[本站讯]近日,山东大学空间科学与技术学院徐天河教授团队联合武汉大学团队在人-机协同导航定位研究方面取得新进展,研究成果以“HRCM: Human–Robot LiDAR-inertial collaborative mapping with robust triangulated planes”为题发表在地学领域权威期刊International Journal of Applied Earth Observation and Geoinformation(中国科学院一区TOP,IF=8.6)。团队博士后丛阳滋为论文第一作者,山东大学徐天河教授和武汉大学陈驰教授为通讯作者,山东大学为第一完成单位。
同步定位与建图(SLAM)是赋予机器在无GPS信号等未知环境中实现自主定位与地图构建的核心技术,为解决复杂场景下的导航与测绘问题提供了关键基础。为提高系统的可靠性与精度,多传感器融合技术通过集成摄像头、激光雷达(LiDAR)等不同特性的感知设备,形成互补优势,已成为主流研究方向。在此基础上,多机器人协同作业通过信息共享与任务分配,能够显著提升环境探索的效率和全局地图的准确性,尤其在时间与资源受限的地下空间探测等任务中展现出重要价值。进一步地,随着具身智能的发展,人机协同作业模式呈现出巨大潜力——通过将人类的认知判断与机器的精准感知相结合,可构建更为智能的探索系统。然而,实现异构平台及多模态传感器数据的高效融合与统一仍是当前面临的关键挑战。因此,本研究聚焦于可穿戴设备与无人系统的协同导航定位,旨在深入探讨异构平台与异构传感器对提升系统整体精度的具体作用。
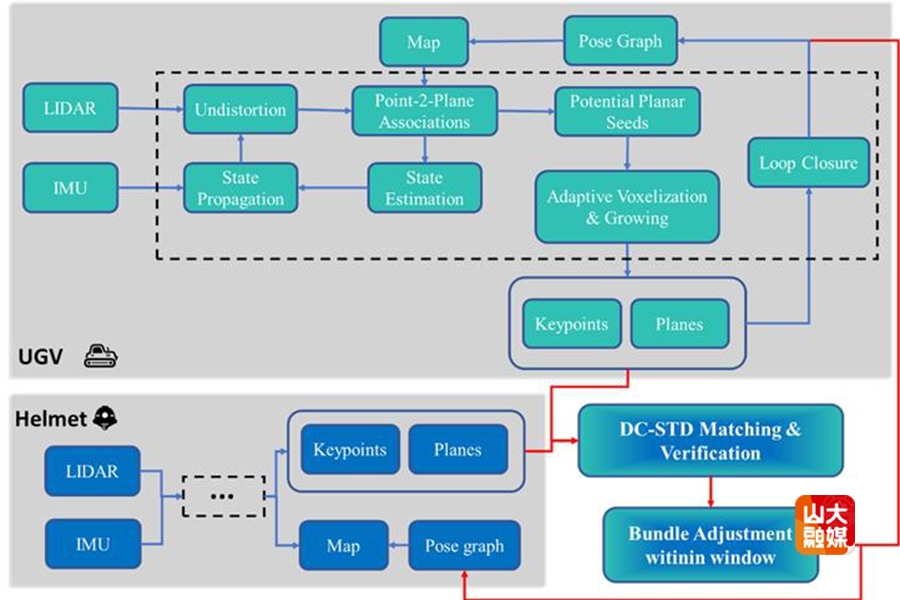
图1 协同系统整体流程示意图
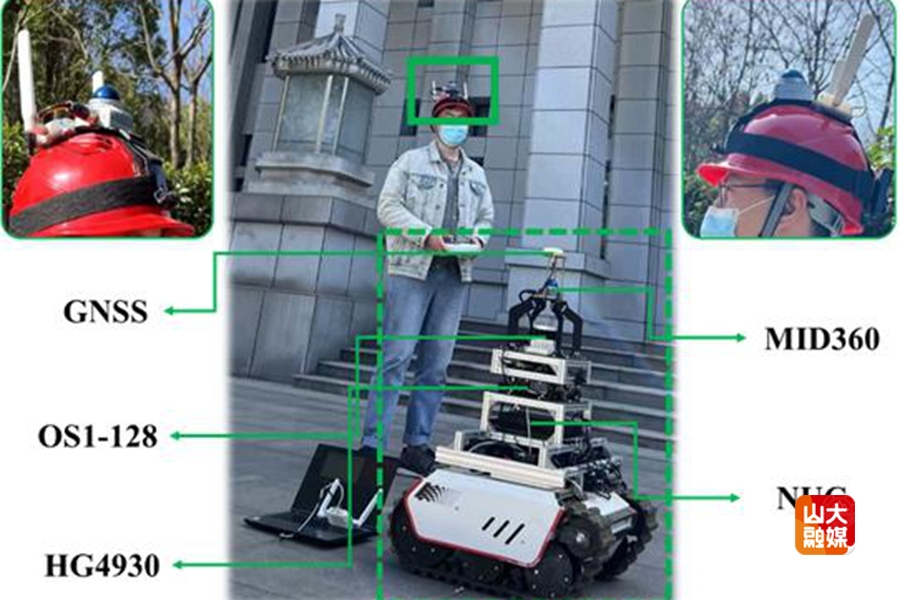
图2 实验设备示意图
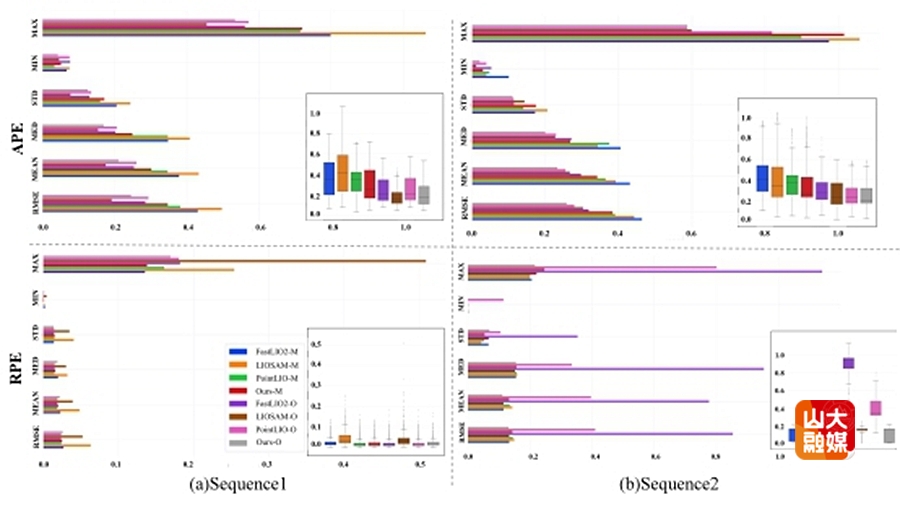
图3 轨迹精度对比分析图
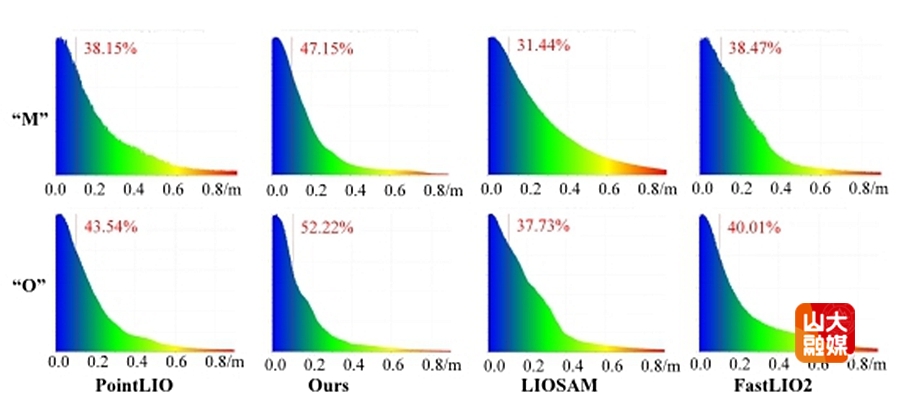
图4 UGV地图精度对比分析图
总体而言,本文系统在两种激光雷达的试验中均取得了最低APE(绝对位置误差),在头盔与UGV的轨迹高度重叠的情况下,系统整体提升效果翻倍。为了评估三维地图的精度,选择高精度MLS作为参考地图,该地图是由Alpha3D通过高精度车载惯性导航系统(INS)采集的。与其他现有先进SLAM系统(PointLIO、LIOSAM 和 FastLIO2)相比,我们的系统实现了最佳性能,Ouster 提高了 8.68%、14.49%、12.21%,MID 提高了 9.0%、15.71%、8.68%。更重要的是,用头盔生成的地图进行相同的评估。但由于该平台的运动剧烈,只有PointLIO能够获得满意的结果,而FastLIO2和LIOSAM则遇到严重漂移。实际建图精度比较如图5所示,比我们的系统下降了 11.11%。
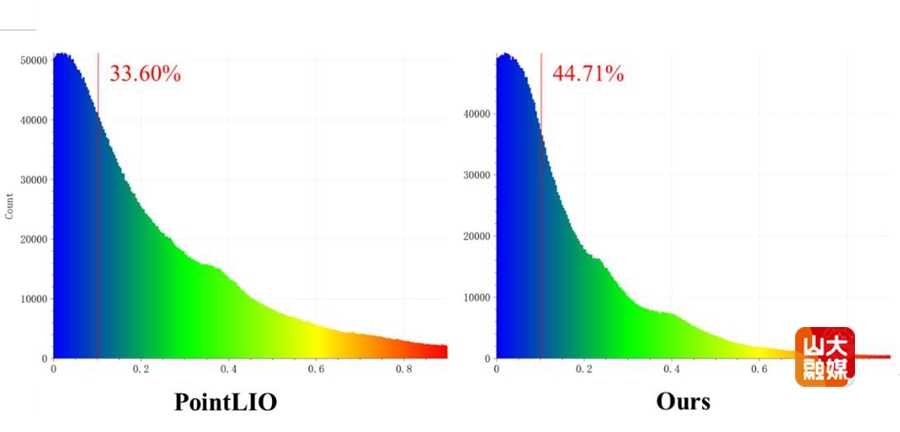
图5 头盔地图精度对比分析图
本文设计了一种基于轻量级LiDAR-惯性系统的穿戴式头盔和UGV(无人车)平台协同测绘系统。系统执行灵活的紧耦合激光雷达惯性里程计来跟踪不同载体的运动状态,为了在异构平台之间创建链接,提出了一种Delaunay约束稳定三角描述符(DC-STD)的位置识别方法。利用整个场景的大型结构平面构建的全局结构以及由显著关键点构成的局部特征,我们的方法能够准确识别共视区域,从而构建多机器人之间的联系。此外,利用Delaunay三角形的稳定结构快速估计两个坐标系之间的相对变换,通过将共轭平面验证与束调整(BA)平滑地结合,以消除不可靠的匹配与关联,最后求解具有密集连接边的联合位姿图,获得全局统一的三维地图,方法整体流程如图1所示,自主搭建的实验设备与实验场景如图2所示,实验对比分析结果见图3—图5。
实验表明,相对于独立的机器人系统,不同平台的互补效应明显,尤其是头盔,最高精度提升可达22.33%。UGV实际上为头盔平台奠定了丰富的地图基础,反之头盔产生的丰富视场弥补了UGV有限的视野,以获得更大范围的约束。更重要的是,本文的方案可以通过AI(人工智能)和LLM(大语言模型)进行扩展,提升其在未知和复杂场景下的自动化与智能化水平。
International Journal of Applied Earth Observation and Geoinformation是国际地球与空间科学领域的顶级期刊,专注发表利用地理人工智能扩展图像和点云处理、地理空间制图以及大规模时空数据分析等现有方法论的贡献,涵盖理论、方法与应用,是该领域影响力最高的期刊之一。该研究得到国家重点研发计划、国家自然科学基金、山东省自然科学基金、中国博士后基金等项目资助。