今天,是我作为山东大学机械工程学院学生参加山东省机器人及人工智能大赛的日子。这是我期待已久的一天。
我参加的是智能驾驶应用赛赛道。比赛地图的设计分为两大部分——直道部分和锥桶部分。在直道部分,我们选择使用PID算法,这是一种经典的控制算法,用于跟踪两侧板子中最近的板子,以保持小车在两个板子的中线位置。这一选择是出于我们对这一算法的信心,希望通过精准的控制让我们的小车能够稳定地通过这一部分。
比赛开始,紧张的气氛充斥着整个赛场。我们的车辆在直道上缓缓启动,通过我们提前设置好的程序,开始跟踪两侧最近的板子。每一寸的移动都让我紧张不已,因为任何一点偏差都可能导致小车偏离轨道,撞到障碍物上。但是,通过团队的密切配合和精心调试,我们成功地让小车稳定地沿着直道前行,顺利地完成了这一阶段的挑战。
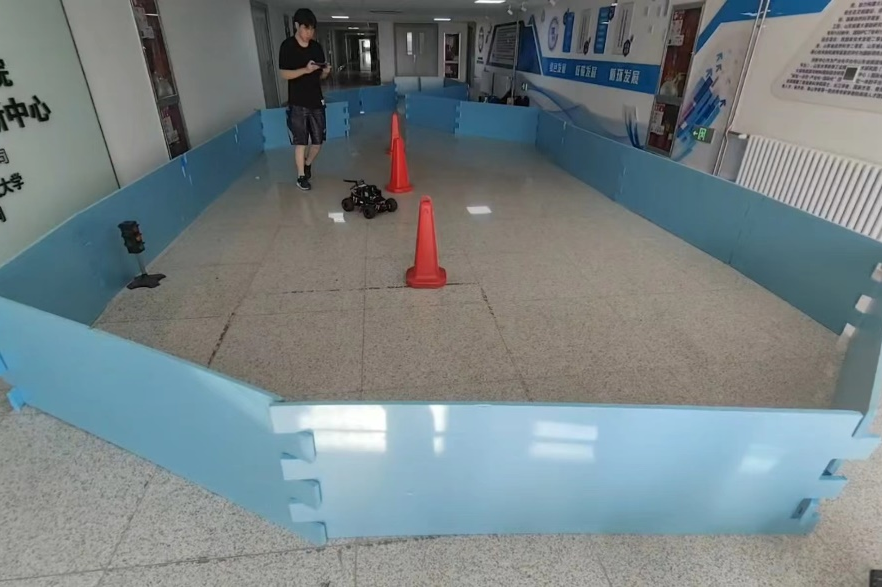
接下来是锥桶部分,这是一个更加复杂的挑战。我们需要让小车围绕着锥桶进行八字形绕行,这要求我们的控制系统具备更高的精度和稳定性。同时,我们还需要让小车能够准确地识别红绿灯,完成停车和启动的任务。这一部分的挑战在于要求我们的算法和传感器系统能够快速地做出反应,并做出准确的判断。
八字形绕行开始了。这是一个动态的过程,需要我们的算法能够及时地调整车辆的轨迹,以应对不断变化的环境。在比赛的过程中,我们遇到了一些意外,差点让小车撞到了锥桶或者偏离了轨道,但是通过及时的调整和团队的努力,我们成功地克服了这些困难,让小车顺利完成了八字形绕行的挑战。接下来,我们又面临着另一个挑战,那就是识别红绿灯并完成停车和启动的任务。这需要我们的视觉系统能够准确地识别红绿灯,并及时地发送指令给控制系统。在经过一番紧张的等待后,我们的小车成功地识别并停在了红灯前,然后在绿灯亮起后顺利地启动,完成了这一任务。
由于整个比赛要求我们的智能车要严格按照提前写好的代码进行自动化的控制,不能有任何干预,所以在比赛开始后,最终的成绩就只能由小车自己决定。虽然我们的小车差一点就撞到了板子上,差一点就无法完赛,但是通过团队的努力和配合,我们最终还是顺利地完成了所有的步骤。这一刻,我感到无比自豪和欣喜。经过了长达半个月的准备时间,我们从初次使用雷达、陀螺仪、编码器这样的传感器,到完成信息通讯,轻松调用数据和处理,再到一次又一次的调试与失败,屡战屡败,屡败屡战,最终成功完赛。这背后是团队精神的强大力量。

希望我们的最终成绩能够让团队有机会进入国赛,继续展现我们的实力和潜力。无论结果如何,我都将从这次比赛出发,继续努力学习和进步,准备迎接未来的挑战。